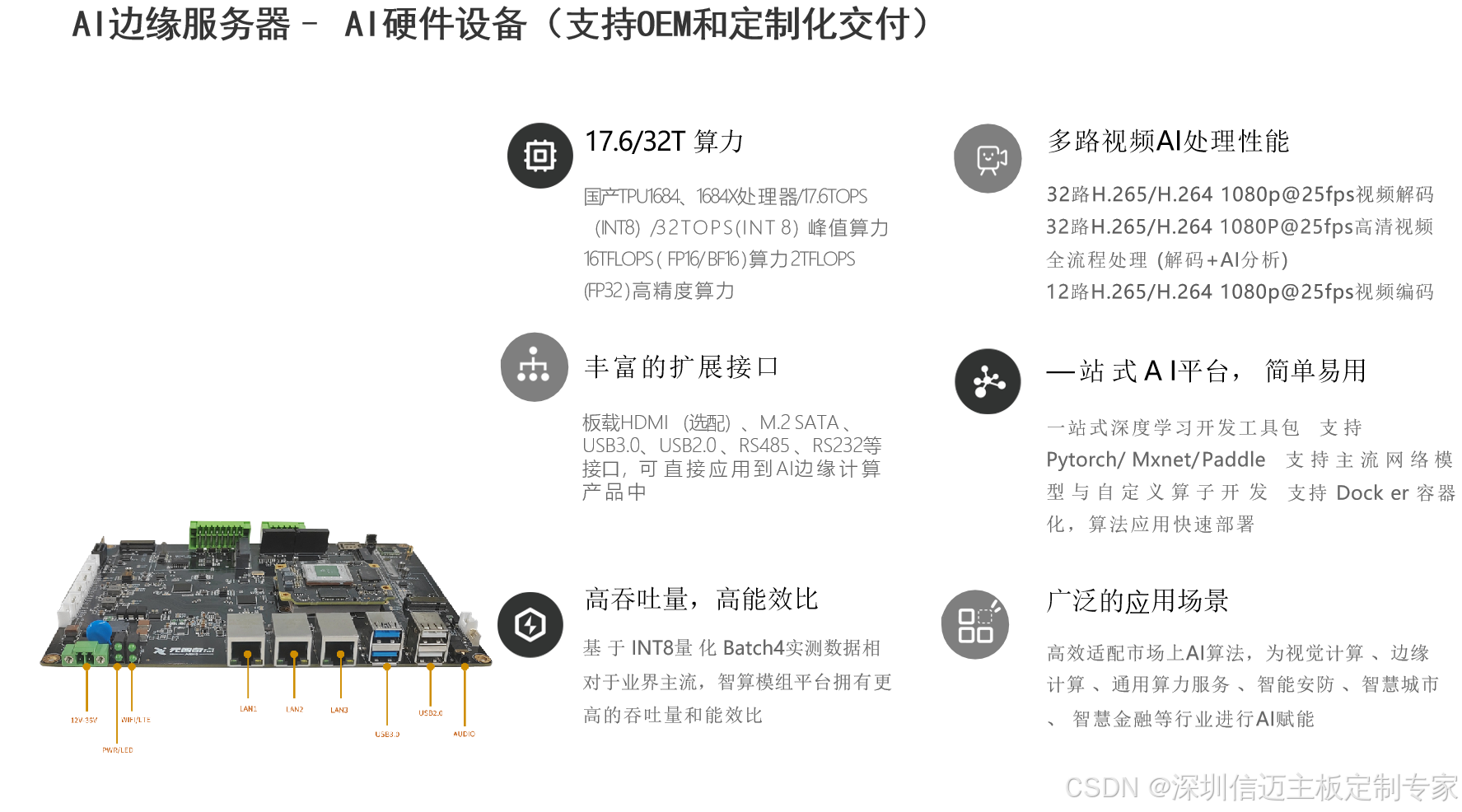
AI Edge Server based on BM1684 - Model Conversion, Large Model All-in-One Machine (Part 2)
Object Tracking
Note: All model conversions are performed within the Docker environment.
First, enter Docker.
We will be compiling in the Docker environment, so first, enter Docker.
:~/tpu-nntc# docker run -v $PWD/:/workspace -it sophgo/tpuc_dev:latest
Initialize Environment
root@2bb02a2e27d5:/workspace/tpu-nntc# source ./scripts/envsetup.sh
Install Compiler in Docker
root@2bb02a2e27d5:/workspace/sophon-demo/sample/YOLOv5/cpp/yolov5_bmcv/build# sudo apt-get install gcc-aarch64-linux-gnu g++-aarch64-linux-gnu libeigen3-dev
This C++ example depends on Eigen. You need to run the following command to install it on the machine where you compile the C++ program:
sudo apt install libeigen3-dev
First, download the relevant files, mainly the test video for tracking, test images, object tracking weights, and object detection weights.
# Install unzip, skip if already installedsudo apt install unzipchmod -R +x scripts/./scripts/download.sh
Then compile the C++ code.
/workspace/sophon-demo/sample/DeepSORT/cpp/deepsort_bmcv/build# cd cpp/deepsort_bmcvmkdir build && cd build# Please modify the -DSDK path according to your actual situation; an absolute path is required.cmake -DTARGET_ARCH=soc -DSDK=/workspace/soc-sdk .. make
This will generate the deepsort_bmcv.soc file. Copy it to the device.
:/workspace/sophon-demo/sample/DeepSORT/cpp/deepsort_bmcv# scp -r deepsort_bmcv.soc linaro@192.168.17.125:/data/yolo/sophon-demo/sample/DeepSORT/cpp


Test Video
./deepsort_bmcv.soc --input=rtsp://admin:sangfor@123@192.168.17.253 --bmodel_detector=../../BM1684/yolov5s_v6.1_3output_int8_1b.bmodel --bmodel_extractor=../../BM1684/extractor_fp32_1b.bmodel --dev_id=0
Run the relevant code; this is for image detection.
cd pythonpython3 deepsort_opencv.py --input ../datasets/mot15_trainset/ADL-Rundle-6/img1 --bmodel_detector ../models/BM1684/yolov5s_v6.1_3output_int8_1b.bmodel --bmodel_extractor ../models/BM1684/extractor_fp32_1b.bmodel --dev_id=0
Video Tracking
python3 deepsort_opencv.py --input ../datasets/test_car_person_1080P.mp4 --bmodel_detector ../models/BM1684/yolov5s_v6.1_3output_int8_1b.bmodel --bmodel_extractor ../models/BM1684/extractor_fp32_1b.bmodel --dev_id=0
IP Camera Video Tracking
python3 deepsort_opencv.py --input rtsp://admin:sangfor@123@192.168.17.253 --bmodel_detector ../models/BM1684/yolov5s_v6.1_3output_int8_1b.bmodel --bmodel_extractor ../models/BM1684/extractor_fp32_1b.bmodel --dev_id=0
Human Pose Estimation
python3 python/openpose_opencv.py --input rtsp://admin:sangfor@123@192.168.17.253 --bmodel models/BM1684/pose_coco_fp32_1b.bmodel --dev_id 0
The generated files will be placed in sample/YOLOv5/data/models/BM1684/int8model/anquanmao_batch1.
:~/fugui/sophon-demo_20221027_181652/sophon-demo_v0.1.0_b909566_20221027/sample/YOLOv5/data/models/BM1684/int8model/anquanmao_batch1# lscompilation.bmodel input_ref_data.dat io_info.dat output_ref_data.dat
Then push the converted model to the development board.
scp compilation.bmodel linaro@{development_board_ip_address}:/data/{your_yolov5_path}
Development Board Environment Configuration
Set up the libsophon environment.
cd libsophon_<date>_<hash># Install dependencies, only needs to be executed once.sudo apt install dkms libncurses5sudo dpkg -i sophon-*.deb# Execute the following command in the terminal, or log out and log in as the current user to use commands like bm-smi.source /etc/profile
python3 yolov5_new_1.py --input rtsp://admin:1111111a@192.168.16.223