Cross-Platform Communication Solution for Parallel Computing on Multi-Core DSPs
The core of parallel computing lies in computational nodes and the communication and coordination mechanisms between them. Although OpenMP provides developers with an easy-to-use, incremental development approach, when integrated with complex architecture MCSDKs, it introduces numerous opaque, non-debuggable black boxes in both tools and code—making it unsuitable for mission-critical domains such as military aerospace, satellite-borne, missile-borne, or rocket-borne systems that demand high reliability and real-time performance. Inter-core communication is a key aspect of multi-core parallel solutions. The most efficient method is using inter-core interrupts; however, to address flexibility in communication, zero-copy techniques based on shared memory pools are inevitably required.
Use Cases for Parallel Computing
- Reduce the solution time for individual problems
- Increase problem scale and improve accuracy
- Enhance fault tolerance
- Improve reusability
- Increase system throughput
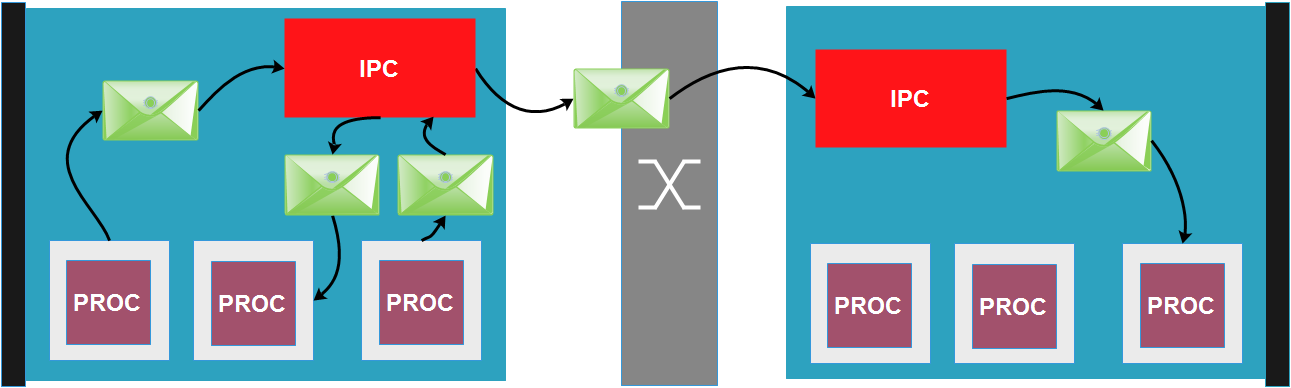
Cross-Platform Communication
MPI-Based Parallel Computing Solution:
- No black boxes—enables convenient debugging and simple code maintenance
- Uses only basic drivers and software components, without reliance on complex components such as SYSBIOS, XDC, or PDK
- Capable of handling larger-scale problems and easily portable to cross-processor scenarios
- Each thread has its own independent memory and variables, making it more stable and reliable than OpenMP
- Integrates with PXI debugging components
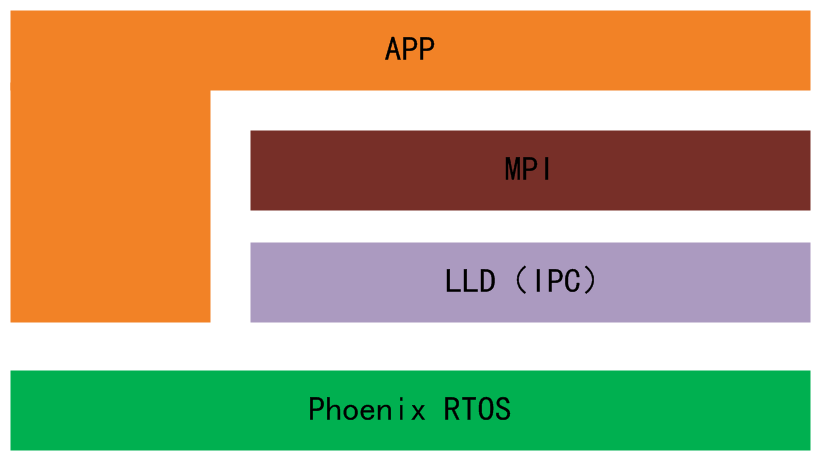
MPI Component Runtime Hierarchy