My Views on Empowering Humanoid Robots with ChatGPT Large Models
My personal views (without involving any project-related details or trade secrets, these are merely my general observations):
-
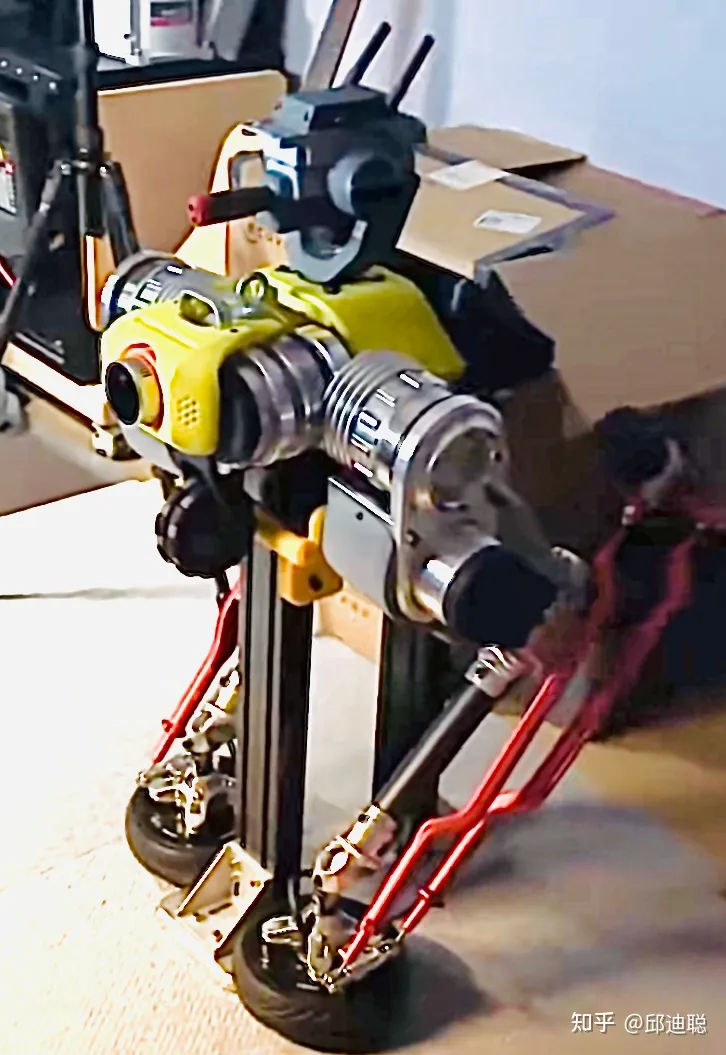
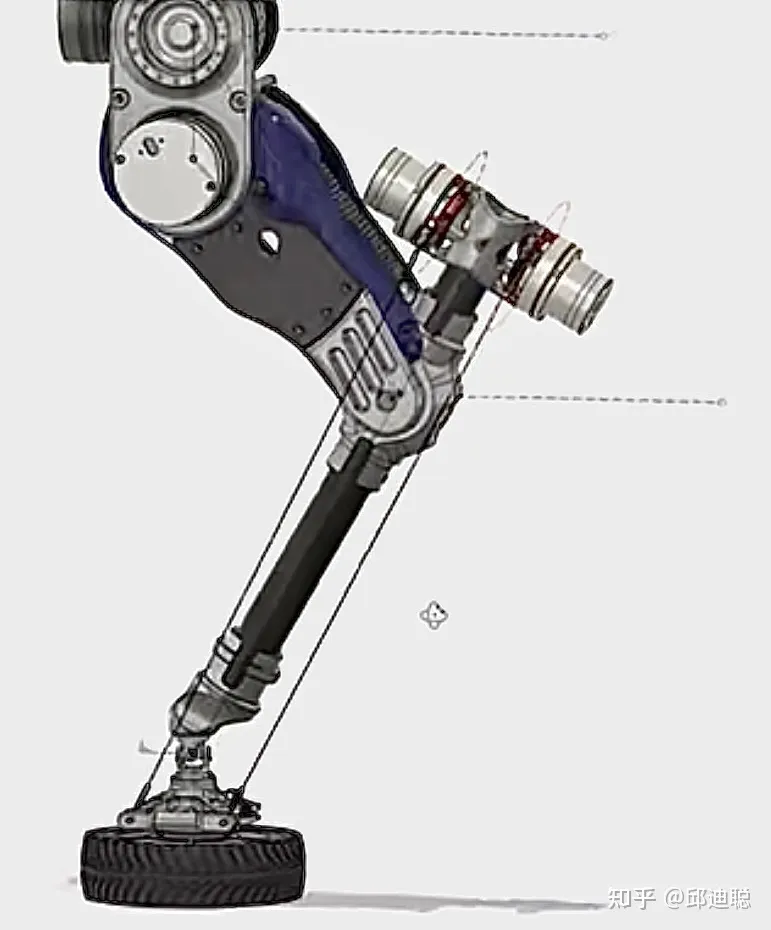
From a macro trend perspective, the flexibility and versatility of humanoid robots are indeed very high, and they hold great promise. Moreover, wheeled-legged locomotion is not unique to this approach; ETH Zurich's ANYMAL quadruped/wheeled robot is an excellent example, demonstrating excellent mobility and flexibility. It can be widely applied in various industrial and commercial scenarios. 【In short, if it can be successfully developed, it will be highly valuable in terms of both versatility and practicality.】
-
However, legged robots, especially bipedal robots, still face unresolved challenges in motion control within academia. There's a long way to go for applications involving more complex scenarios. It's not just about the fundamental control theory; more importantly, it involves refining the product and adapting it to various scenarios, which requires significant investment of capital and effort. Of course, as a major KOL, he has access to funding channels, and I privately have a general understanding that he has the capability to embark on this endeavor, though it remains a long and arduous journey. As someone with the capability and determination to pursue this, we should remain hopeful and wait to see what unfolds. A potentially significant challenge here is the motors; they are difficult to develop, expensive to produce in-house, and off-the-shelf options might not perform optimally. Furthermore, implementing legged/wheeled transitions is not easily achieved with motion control algorithms. 【In summary, this project presents significant technical challenges, requiring substantial investment of capital and effort to develop algorithms and refine the product.】
- The cost of this product will not be low. As a research project, resources can be invested without regard to cost,