EtherCAT Slave Design and FOC Servo Motor Current Loop Control
Introduction to EtherCAT Slave Development Solutions - Including ET9300 Comparison
General EtherCAT Design Requirements (for uC+ESC solutions):
Hardware: Main controller uC + ESC (EtherCAT Slave Controller, selectable from various vendors)
Operating System: No special requirements, determined by product performance, an OS may not even be necessary.
Software: The main controller uC needs to handle EtherCAT message communication. ESCs typically come with development kits for easy porting.
Challenge: How to achieve data interaction between the uC and ESC.
Requirements for Vendors:
Provide high-quality source code (high code efficiency, optimized EtherCAT performance)
Provide at least one hardware platform demo
Provide complete EtherCAT network diagnostic and configuration tools: for testing, etc.
A typical slave includes the following three core components:
Physical Layer: Requires an Ethernet port
Data Link Layer: Includes an EtherCAT Slave Controller (ESC) (this is the communication module) and EEPROM.
Application Layer: Includes a main controller, also known as an application controller or microcontroller (uC) (e.g., DSP28346 or F407).
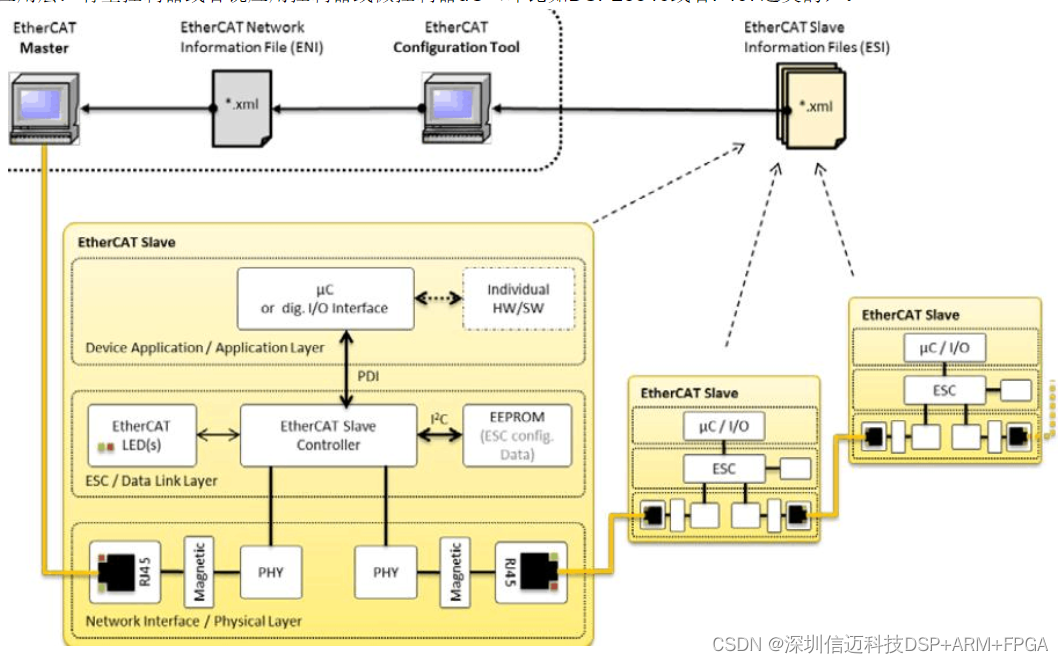
The ESC, or EtherCAT Slave Controller, can be implemented using an FPGA (Field Programmable Gate Array) or an ASIC (Application Specific Integrated Circuit).
EtherCAT Slave + FOC Reference Solution
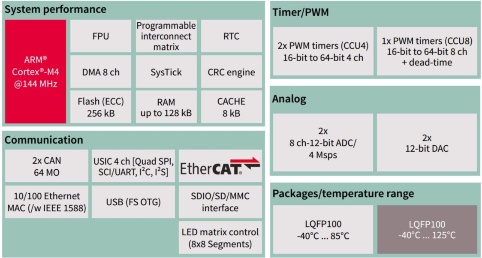
The Infineon XMC4300 microcontroller series reduces the complexity and cost of EtherCAT implementation. XMC4300 microcontrollers feature EtherCAT communication capabilities, with applications including factory automation, industrial motor control, I/O modules, and robotics.
The internal structure of the XMC4300 microcontroller is shown in the figure below:
The EtherCAT slave is implemented based on the XMC4300, and FOC servo motor current loop control is implemented using Intel PSG MAX10. The system block diagram is shown below:
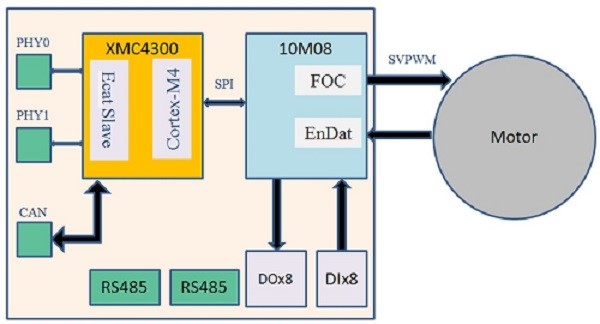
This development board provides the following interfaces:
- EtherCAT Slave x2
- USB-> UART
- CAN, RS485
- DIx8, DO x8