3D视觉识别案例:3D无序棒料抓取,阀体圆环上下料,电机定子上料
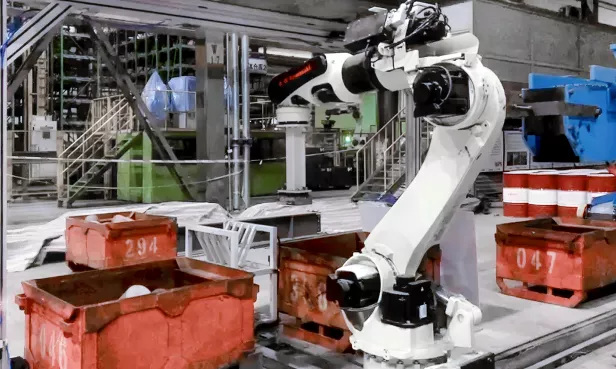
3D Bin Picking of Disordered Rods
A leading automotive industry company
Project Background
A renowned automotive company in Changchun required 3D vision to automate the loading of circular rods.
Operation Process
Steel rods are sequentially cut/sawed, picked from a deep bin, first placed on a V-shaped secondary positioning platform, and then picked from the platform onto a conveyor line. The target workstation is a heating equipment with a conveyor chain.
Solution Highlights
• Motion Trajectory Planning: Automatic avoidance of singular points during motion trajectory planning ensures safe and smooth trajectories. No manual teaching is required; the online collision-free motion planning algorithm generates collision-free, time-optimal paths.
• Topple Function: To achieve 100% bin clearance, a topple function was developed, allowing obscured workpieces to be picked a second time after motion planning.
• Point Cloud Denoising: Visual point cloud denoising processes are applied to remove highly reflective points.
• HMI Customization: To meet the operating habits of the end customer's operators, a customized HMI was developed to enable one-click operation, significantly enhancing end-user satisfaction.
Valve Body Ring Loading and Unloading
A leading hydraulic enterprise
Project Background
The client, a leading hydraulic enterprise in East China, required 3D vision to automate the loading and unloading of valve body ring workpieces for a total of 5 machine lines. Raw workpieces are loaded on pallets and need to be picked one by one and loaded to a fixed position on the machine. After three processing steps, finished workpieces are unloaded back onto the same pallet. During visual guidance for loading, raw and processed finished parts need to be distinguished. The surface material of the workpieces becomes reflective after processing.
Operation Process
• Manual transport of pallets to the robot workstation, visual recognition of raw workpiece pose, guiding the robot to pick and load.
• After processing, visual imaging locates the placement position, guiding the robot to unload finished workpieces.
• Repeat the above actions until the last workpiece on the current pallet is picked, then notify personnel for pallet replacement.
Solution Highlights
• Utilizes an XM-SP-L camera, installed on a mobile module, capable of distinguishing and recognizing raw workpieces and reflective finished workpieces.
• When the vision system identifies only one raw workpiece remaining on the pallet, it picks and loads it while unloading the preceding finished workpiece. Upon completion, personnel are notified to replace the pallet, ensuring uninterrupted machine operation.
• A production rhythm of thousands of pieces per hour, reducing overall line costs by nearly half and significantly improving efficiency.
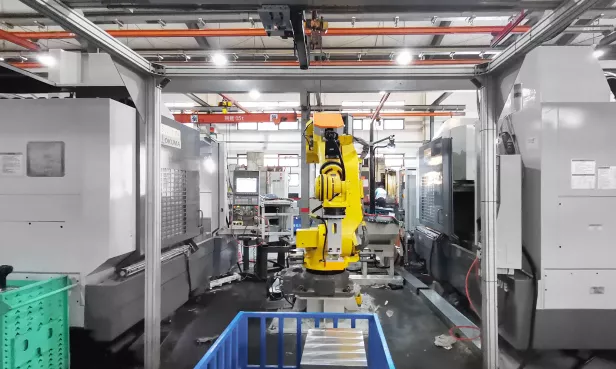
Motor Stator Loading
A listed pump manufacturing company
Project Background
The client, a renowned listed pump manufacturing company, required 3D vision to achieve precise automated loading of motor stators at its Zhejiang factory. The workpieces are iron motor stators, tightly arranged in a bin.
Operation Process
• Stator core products are tightly arranged in the bin; the equipment is informed of the product type.
• 3D vision identifies the product, 2D vision precisely locates the product's gripping holes, guiding the robot to pick.
• 2D vision performs secondary precise positioning of the product from below to obtain angular information, and then the robot places the product into the processing position.
Solution Highlights
• Utilizes an XM-SP-L camera in conjunction with a 2D camera, installed in a fixed manner, simultaneously achieving precise product position and angle localization, ensuring final product placement accuracy of up to ±0.3mm.
• Ensures accurate picking even with tightly arranged products, with a cycle time controlled within 10 seconds.
3D Guided Plate Part Positioning and Picking
A renowned mold steel group
Project Background
A renowned mold steel group in Guangzhou required 3D guided plate part positioning and picking, along with 2D recognition for information acquisition. The original setup, using gantry cranes and manual handling, had an extremely low safety factor.
Operation Process
• After the 3D camera visually identifies the product's position, the robot picks the product using an electromagnet.
• Before placing it onto the secondary positioning fixture, a dot laser and sensors detect the product specifications; a 2D camera recognizes QR code stickers to differentiate product materials.
Solution Highlights
• Vision Algorithm: Facing highly reflective workpieces that cause specular reflections in point clouds, a unique vision algorithm reduces the impact of reflections on recognition. Even when point cloud camera imaging is suboptimal, picking can still be achieved through algorithmic techniques.
• Point Cloud Clustering: For numerous products with significant specification differences, point cloud clustering technology is used for any unknown incoming products, solving customer project challenges while reducing project costs.
• Integrated 3D Guided Picking and 2D Recognition Workstation: To meet the client's production needs, a workstation integrating 3D guided picking and 2D recognition was designed and planned, with the added functionality of a 2D camera for recognizing workpiece QR code stickers, significantly improving production line productivity.
• Gripper Design: The electromagnet design allows compatibility with various product models, handling products with significant thickness variations and excessive weight. The excellent gripper design is perfectly suited.