NXP i.MX8-based EtherCAT Real-time Motion Controller Design: Linux+Xenomai+IGH+RTnet
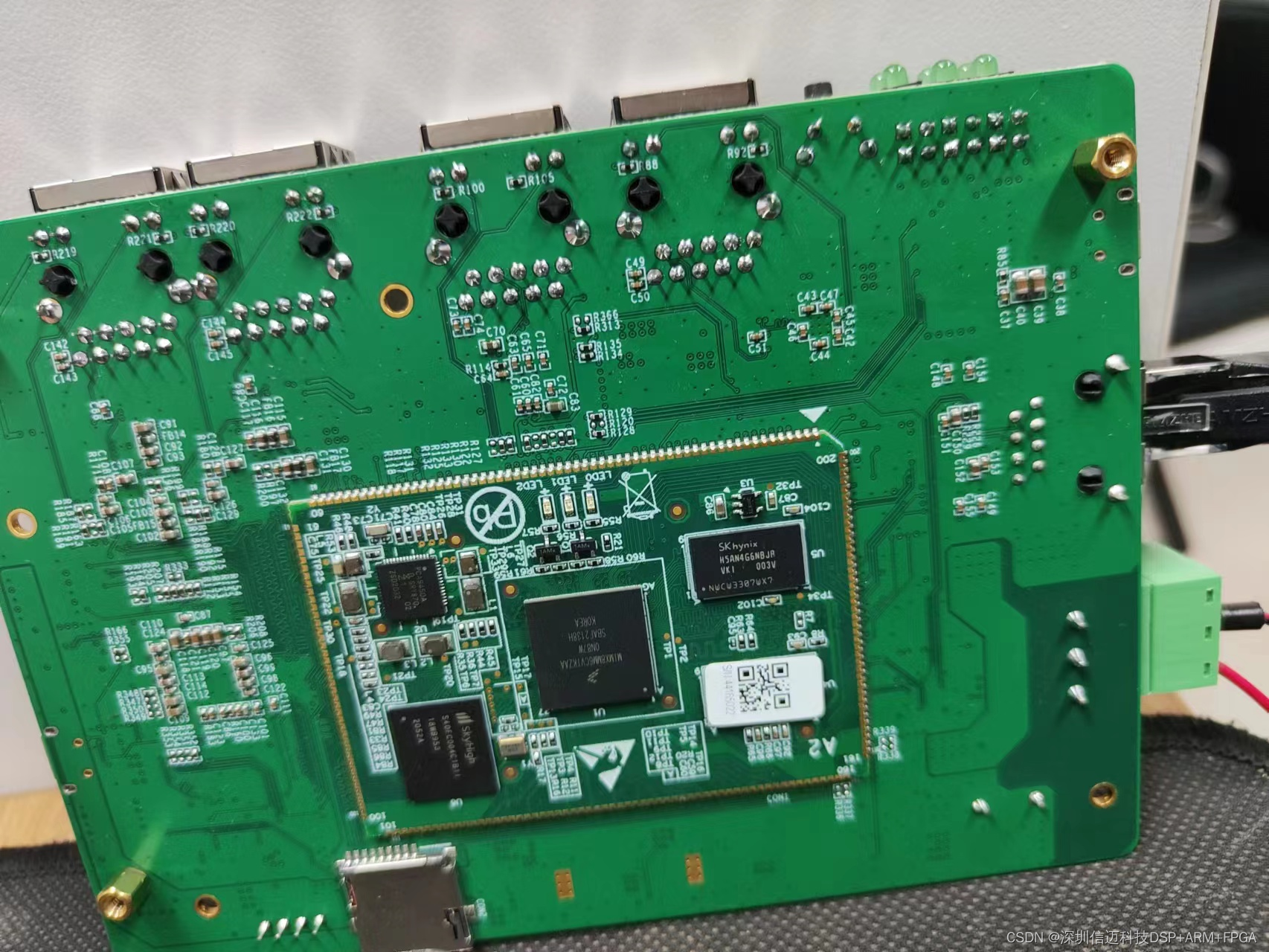
Hardware Platform: i.MX8
Software Architecture: Linux + Xenomai + IGH + RTnet

Designed based on the NXP i.MX8 processor, featuring a quad-core ARM-A53 with a clock speed of up to 1.3GHz, onboard 2GB RAM, and 8GB ROM. It operates within an ambient temperature range of -40℃ to 85℃, meeting the requirements for industrial and general industrial applications. The i.MX8M processor features industry-leading audio, voice, and video processing capabilities, offering full 4K UltraHD resolution and HDR (Dolby Vision, HDR10, and HLG), and providing the highest level of professional audio fidelity. It is suitable for fanless operation, with low-cost thermal systems and long battery life. It boasts the latest high-speed interfaces for flexible connectivity and offers a 10-15 year long-term product supply program. ·Dual Independent Display Outputs MIPI-DSI (1080p) and HDMI 2.0a (4K) Vivante GC7000 Lite GPU, Supports OpenGL ES 3.1, OpenGL 3.0, Vulkan, Open CL 1.2 ·Video Decoding 4Kp60 HDR(h.265, VP9), 4Kp30 (h.264), 1080p60 (MPEG2, MPEG4p2, VC1, VP8, RV9, AVS/AVS+, h.263, DiVX), MJPEG - 8x8 ·Video Encoding 1080p60 (MPEG2, MPEG4p2, VC1, VP8, RV9, AVS, h.263) - Software Encoding ·Rich Peripheral Interfaces 2x MIPI-CSI, 2x USB3.0, 2x PCIe2.0, 4x UART, 1Gb Ethernet

Ø This product is suitable for equipment requiring motor motion control, such as robot control and non-standard automation equipment control.
Ø Supports secondary development for Human-Machine Interface (HMI) and application layers. Development platform: C++.
Ø Utilizes EtherCAT real-time bus with 100Mbps speed and microsecond-level synchronization accuracy. Supports general EtherCAT servos and I/O modules. Supported EtherCAT servo brands include Panasonic, Delta, Techmation, Inovance, Hecuan, Estun, etc. Supported EtherCAT I/O modules include Leadshine, Xinyang, etc.
Ø Supports up to 64-axis control, easily enabling gantry synchronization control and multi-axis coupled motion control.
Ø Features a modular software design, compatible with and expandable for various application process packages, facilitating convenient secondary development for users.
Ø Supports welding processes, swing welding processes, weld seam cameras, palletizing processes, vision-based processes, and multi-belt synchronous tracking processes.
Ø Hardware is based on the ARM platform, utilizing the Linux operating system (with a built-in real-time kernel).
Ø Supports control of various robot body structures: traditional serial 6-axis, UR-like structures, SCARA, and Delta parallel robots.
Ø Supports motor position control mode and speed control mode, with an interpolation cycle as low as 1ms.
Ø Supports multi-tasking and process functions, simplifying programming and operation. User commands are compatible with FANUC robot programming language.
Ø Supports circular interpolation, helical interpolation, linear interpolation, joint interpolation, online position modification, and online speed modification.
Ø Supports continuous interpolation look-ahead for speed.
Ø Provides SDK calling interfaces.
Ø The host application can be run on a PC, a teach pendant, or directly developed on this controller.
Ø Components are industrial grade, with an operating temperature range of -20℃ to +70℃.