RK3399+XILINX K7 FPGA Applied in Radar, Communication, Telemetry, Imaging, and Other Fields
xdma driver compilation on ARM, cross-compiler configuration, and kernel compilation.
Here's an image first.
The following refers to XILINX FPGA+RK3399 PCIE X4_FPGA零下的博客-CSDN博客
xdma Compilation Instructions
- Install cross-compiler (official version 6.3 is used)
// An highlighted block 1、 mkdir -p /opt/FriendlyARM/toolchain/ # Create a new directory 2 、cp gcc -linaro-7.4.1-2019.02-x86_64_aarch64-linux-gnu.tar /opt/FriendlyARM/toolchain/ 3、tar xvf gcc-linaro-7.4.1-2019.02-x86_64_aarch64-linux-gnu.tar # Extract the compiler to the current directory 4、 mv gcc-linaro-7.4.1-2019.02-x86_64_aarch64-linux-gnu gcc-linaro-7.4.1 # Shorten the name 5 、source setEnv.sh # Set temporary environment variables, only valid in the current terminal, source before each compilation.
Verify aarch64 -linux-gnu-gcc -v 2. Modify kernel path in Makefile, specify your own compiler
// An highlighted block obj-m += xdma.o xdma-objs := xdma-core.o xdma-sgm.o xdma-ioctl.o xdma-bit.o
KERNELDIR ?=/home/ycd/project/rk3399/kernel/kernel-rockchip-nanopi4-linux-v4.4.y PWD := $(shell pwd)
ROOT := $(dir $(M)) XILINXINCLUDE := -I$(ROOT)../include -I$(ROOT)/include
GCC49 :=aarch64-linux-gnu- all: $(MAKE) -C $(KERNELDIR) M=$(PWD) modules
install: all $(MAKE) -C $(KERNELDIR) M=$(PWD) modules_install depmod -a install -m 644 10-xcldma.rules /etc/udev/rules.d
clean: rm -rf *.o *.o.d *~ core .depend .*.cmd *.ko *.ko.unsigned *.mod.c .tmp_versions *.symvers .#* *.save *.bak Modules.* modules.order Module.markers *.bin
CFLAGS_xdma-core.o := -Wall -DDEBUG $(XILINXINCLUDE)
ifeq ($(GCC49),1) CFLAGS_xdma-core.o += -Wno-error=date-time endif
CFLAGS_xdma-sgm.o := $(XILINXINCLUDE) CFLAGS_xdma-bit.o := $(XILINXINCLUDE) CFLAGS_xdma-ioctl.o := $(XILINXINCLUDE)
After compiling xdma.ko, import it to the development board, and it can then be inserted into the kernel.
=============Below is the C6678+K7 platform solution, for comparison====================
-
RK3399 is domestically produced, and K7 also has a corresponding Fudan Micro domestic replacement;
-
The C6678 chip is already 10 years old and has no new iterations.
A binocular intersection visual image processing system platform based on FPGA and DSP collaborative processing architecture. This platform uses one TI KeyStone series multi-core floating-point/fixed-point DSP TMS320C6678 as the core processing unit to execute visual image processing algorithms, and one Xilinx Kintex-7 series FPGA XC7K325T as the video co-processing unit to perform video image encoding/decoding, caching, and pre-processing. This system can adapt to various video format inputs and outputs, achieve target measurement, tracking, and recognition based on binocular intersection, and can be widely applied in airborne or vehicle-mounted equipment.
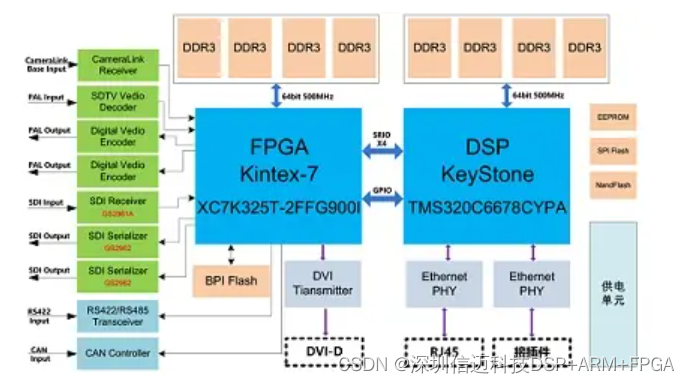
FPGA + Multi-core DSP Collaborative Processing Architecture;
Video Image Interface Performance:
1. 1-channel CameraLink Base digital video input;
2. 1-channel PAL analog composite video input, resolution 720x576, 25 fps;
3. 1-channel PAL raw video output, resolution 720x576, 25 fps;
4. 1-channel PAL processed video output, resolution 720x576, 25 fps;
5. 1-channel HD-SDI high-definition digital video input, resolution 1920x1080@30p;
6. 1-channel HD-SDI high-definition raw video output, resolution 1920x1080@30p;
7. 1-channel HD-SDI high-definition processed video output, resolution 1920x1080@30p;
8. 1-channel DVI display output interface, supports 1080P resolution;
Processing Performance:
1. DSP Fixed-Point Operations: 40 GMAC/Core * 8 = 320 GMAC;
2. DSP Floating-Point Operations: 20 GFLOPs/Core * 8 = 160 GFLOPs;
Dynamic Storage Performance:
1. DSP Processing Node: 64-bit, 4 GByte DDR3-1333 SDRAM;
2. FPGA Processing Node: 64-bit, 2 GByte DDR3-1600 SDRAM;
Interconnect Performance:
1. DSP and FPGA: SRIO x4@5Gbps/lane;
2. DSP and FPGA: PCIe x2@5Gbps/lane;
Physical and Electrical Characteristics
1. Board Dimensions: 158 x 217mm
2. Board Power Supply: 3A max@+12V (±5%)
3. Cooling Method: Natural air cooling
Environmental Characteristics
1. Operating Temperature: -40°~﹢85°C, Storage Temperature: -55°~﹢125°C;
2. Operating Humidity: 5%~95%, non-condensing
Software Support
1. Optional integrated Board Support Package (BSP):
-
DSP low-level interface drivers;
-
FPGA low-level interface drivers;
-
Board-level interconnect interface drivers;
-
Multi-core processing low-level drivers based on SYS/BIOS;
6. Can provide customized algorithms and system integration according to customer requirements:
Application Scope
-
Machine Vision;
-
Optoelectronic Information Processing;
-
High-Speed Graphics Processing;