Porting SOEM EtherCAT on TI DSP RTOS
This project primarily focuses on porting SOEM to the Xinmai Technology TI OMAPL138 C6748 DSP. The main work involves adapting the operating system and hardware layers.
Below, let's briefly introduce the concepts.
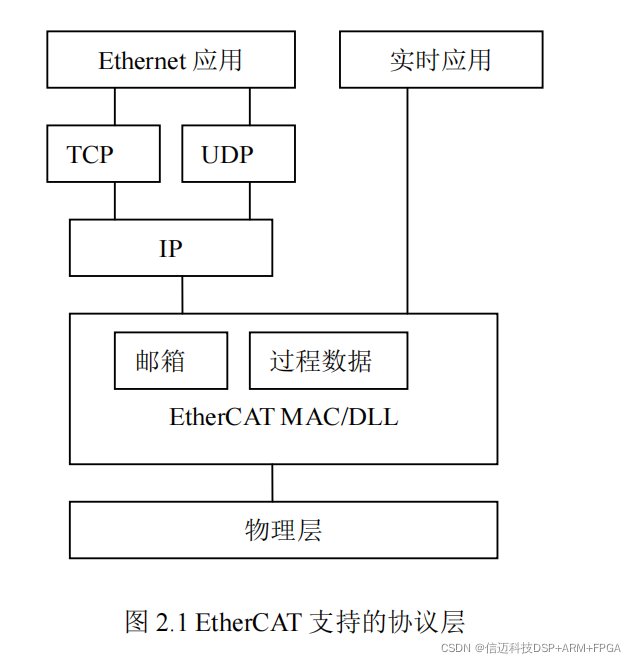
EtherCAT is an open-architecture fieldbus system based on Ethernet. The EtherCAT data portion is encapsulated within Ethernet frames, and the master station sends these Ethernet frames for transmission over Ethernet. EtherCAT only requires the physical layer, data link layer, and application layer; the other four layers of the OSI seven-layer protocol architecture are not necessary. The EtherCAT frame structure can also be encapsulated in IP/UDP datagrams, which are then uploaded to the slave's application layer for processing by the slave controller's hardware [16]. This is illustrated in Figure 2.1.
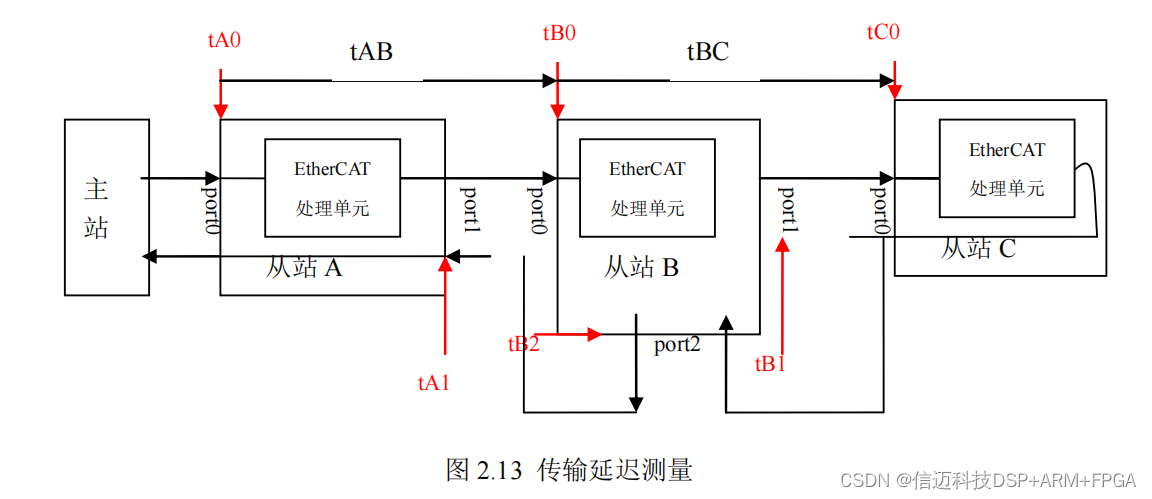
The basic steps of the transmission delay measurement algorithm are as follows:
a. The master broadcasts a measurement frame. A measurement frame is simply writing any value to port 0's time register. Write 0 to register DCTIME0 in each slave.
b. When this measurement frame reaches port n (n=0,1,2,3) of each slave and the ESC processor, the local clock value at the time of arrival will be recorded in the corresponding timestamp register.
c. The master reads the local time of each slave port and, based on network topology analysis, calculates the transmission delay time for each slave.
d. Finally, the master writes the calculated result to the corresponding slave's system time delay register, ECT_REG_DCSYSDELAY.
As discussed previously, if all slaves used the same clock source, or if the clock source frequencies of all slaves were strictly identical, then drift compensation would not be necessary. To minimize the impact of drift on synchronization, drift compensation must be performed. The time control loop is used for this purpose. The time control loop model is shown in Figure 2.14:
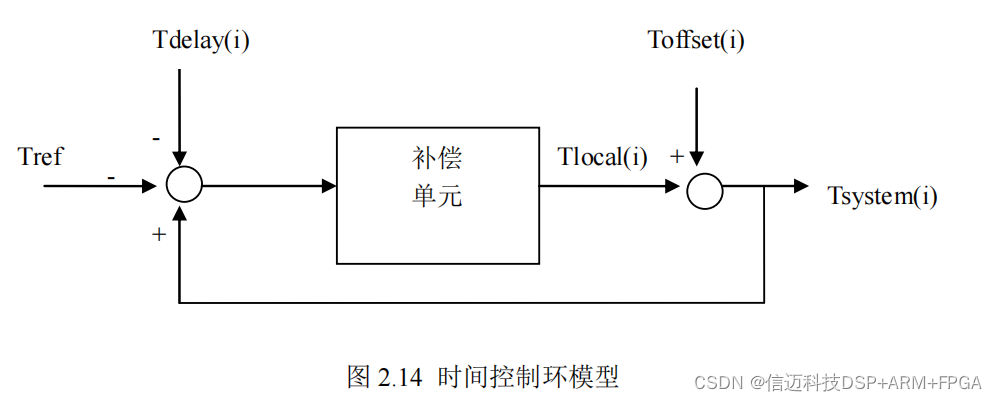
The time control loop is a negative feedback loop. Each slave has such a time control loop. In the figure, 'i' represents slave 'i', indicating the time control loop for slave 'i'. Its basic principle is to compare the local system time with the reference clock's system time. Based on the comparison result, the compensation unit either speeds up or slows down the local clock.
To ensure the operation of the time control loop, EtherCAT introduces the following mechanisms:
a. The slave provides a system