Cost-Effective, High Real-Time EtherCAT Fieldbus Industrial Motion Control Solution
In the past two months' weekends, I ported the SOEM master to STM32. It runs normally in free run mode and can drive Beckhoff I/O slaves. There are some bugs in DC mode, and it can only drive a portion of servo drives.
I plan to document some of the porting process on my blog and share it with everyone. There will certainly be some inaccuracies, and I welcome your criticism and corrections.
The entire porting process is actually similar to porting lwIP to STM32. The SOEM master was designed with a hardware abstraction layer and an operating system abstraction layer architecture, so it's sufficient to modify the code in the osal, oshw, and nicdrv sections.
Of course, I referenced a lot of online resources during the porting process (not limited to the following). Here, I'd like to thank these experts.
lwIP Porting: This part of the information referenced the STM32 tutorials from Atom and Wildfire, as well as the STM32 reference manuals. Just review the Ethernet-related sections. Related Papers: Comrade Wang Huijiao's Master's Thesis "Research on the Implementation of EtherCAT Master Station Based on Embedded Platform" This article is very crucial; it basically elaborates on the detailed porting process, so everyone can study it carefully. Success Stories: Some netizens have successfully ported it to STM32, and I'm sharing their work here. EasyCAT, a project developed by an overseas expert, also based on STM32. "Sharing EtherCAT Master Code Based on STM32 and SOEM" from Amo Electronics Forum and some open-source code on GitHub...
Xinmai Technology EtherCAT Profibus Profinet Bus, Industrial Fieldbus Technology Application Development, The most cost-effective ST32/Infineon solution,
Schematics, source code,
Suitable for beginners learning, company product development, or academic theoretical research,
Full technical support provided.

Performance Advantages
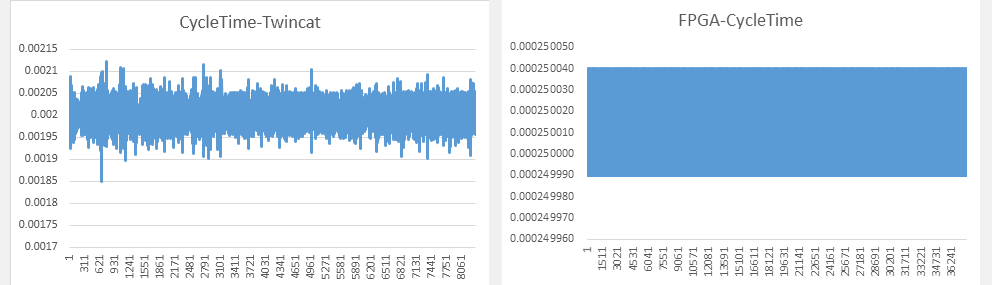
- Faster cycle time, achievable at 31.25us
- Lower jitter, jitter time less than 0.004us
- Good synchronization performance, master and slave devices can achieve clock synchronization accuracy far less than 1us (4-axis actual measurement: 50ns)
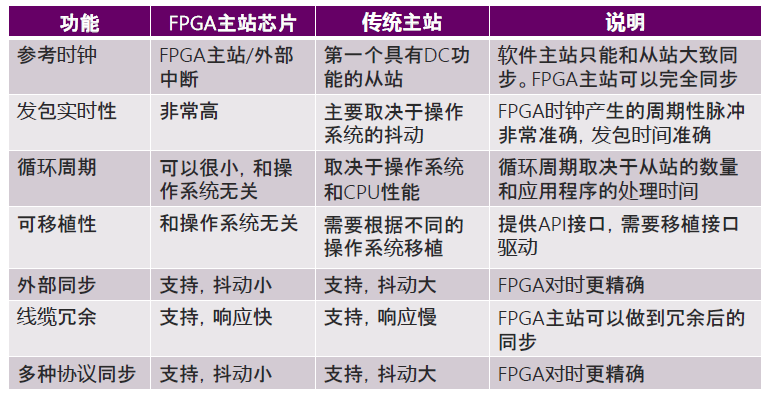
Performance Comparison:

More Performance Comparison Summary: