Design of Harvesting Manipulator Control System Based on AM5728 DSP+ARM
By leveraging image processing techniques from pattern recognition and using the AM5728 processor from TI's Sitara series, this paper presents a harvesting manipulator control system based on a vision system and servo motor driving methods. Experimental results show that the system can accurately harvest target fruits with a success rate of 89%. It takes about 9 seconds to pick one apple. The system features fast operation, high accuracy, and strong feasibility, meeting general fruit harvesting requirements and demonstrating excellent practicality.
Robotics is one of humanity's greatest inventions of the 20th century. With increasing population, food supply pressures, and a continuous decline in agricultural labor, "unmanned farms" are becoming a mainstream trend. Harvesting robots, in particular, offer significant advantages in reducing labor intensity and improving work efficiency, making them a key player in "smart agriculture." Given this context, this paper combines pattern recognition technology with manipulator control techniques to develop a harvesting manipulator control system that is fast, accurate, and highly feasible.
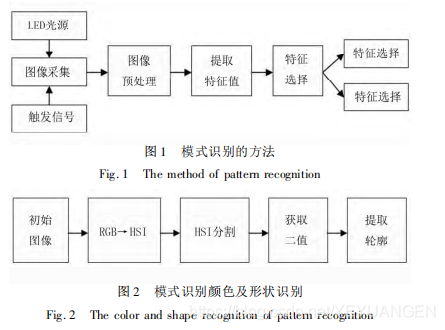
Pattern recognition primarily relies on computer platforms and uses probabilistic and statistical analysis methods to deeply study intelligent pattern processing. In general, environments and objects are collectively referred to as "patterns." With the advancement of computer science, artificial intelligence, and machine learning technologies, the information processing techniques studied by humans have become increasingly complex, and the entire information processing process essentially involves pattern recognition. In the field of intelligent control, pattern recognition refers to perceiving the environment—for instance, capturing image data of the surroundings using cameras—and then analyzing it through image processing techniques. Theoretical research in intelligent control pattern recognition covers various aspects, including image acquisition, preprocessing, feature extraction, classification training, and decision-making. The general pattern recognition process is illustrated in Figure 1.
Image acquisition refers to capturing target information using a CCD camera under the control of a trigger signal and assisted by LED lighting. Image preprocessing involves enhancing the captured images, removing noise, and smoothing. After preprocessing, the next step is to extract image features, followed by classification, training, and decision-making. Commonly used feature information includes color, texture, and shape, among which color and shape recognition are most frequently applied. The workflow for color and shape recognition in pattern recognition is shown in Figure 2.

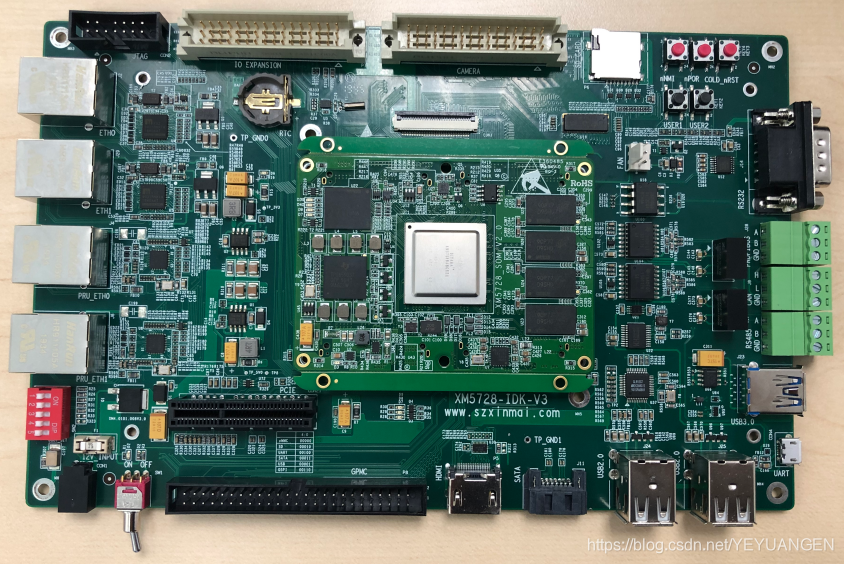
This design is based on secondary development of the Xinmai AM5728 development board XM5728-IDK-V3.
For technical discussions, add WeChat: 13670212541