基于 ZYNQ ARM+FPGA+AI 多通道船舶噪声采集系统,高精度高实时,支持边缘AI分析
随着电子通信的发展和各界自动化技术的进步,船舶在保证基本的海上安全航行和运输安全的同时,也逐渐
强调为船员和乘客提供更舒适、健康的航行环境。在这一背景下,对船舶噪声的有效采集与控制成为了解决上述情况的必
由之路,论文针对船舶自动化和智能化的需求,提出了采用基于ZYNQ平台实现对舶噪声的多通道采集。ZYNQ架构结合软
硬核的协同工作能力、高速数据处理能力、小体积以及低功耗等特点,非常适合于此类应用。该系统能够实现对船舶噪声的
实时、高速且准确的采集,从而为后续的噪声处理和噪声控制提供可靠的数据支持,实现船舶航行的安全提升以及乘员乘船
的舒适度提升。这种系统设计不仅提高了噪声管理的效率,还有助于提升船舶运营的整体质量,为船上人员提供一个更优
质的航行环境。
船舶内部机械种类繁多,且船身结构复杂,动
力机械在运转过程中,动力机械振动直接向空气辐
射产生空气噪声,船上动力机械振动沿着船舶结构
传播到整个船体,再向外辐射产生结构噪声,船体
的振动向水中辐射产生水噪声[2~3] 。
实时、高速、准确采集船舶噪声信号是船舶的
减振降噪以及故障判断奠定的出发点也是最基本
的一步。针对船舶中出现的三种不同类型的噪声:
空气噪声、水噪声以及振动噪声,可以选用相应的
传感器来进行精确测量。具体而言,传声器可用于
测量空气中的噪声,加速度传感器适用于捕捉振动
产生的噪声,而水听器则专门用于检测水中的噪
声。通过这三种专门的传感器,可以有效地对船舶
的各种噪声进行详细测量与分析[4] ,再设计一个采
集系统将这些电信号经过调理、采集、量化以及编
码后转换成计算机可识别的数字信号[5] 。
ZYNQ系列芯片,集成了处理器系统(PS)和可
编程逻辑(PL)两个核心组成部分。处理器芯片为
ARM 的双核处理器,可编程逻辑芯片为 Xilinx 的 7
系列的 FPGA 架构实现了全功能的片上系统的构
建。这种结合不仅优化了硬件的处理能力,同时也
提高了系统的灵活性和多功能性,使得ZYNQ系列
成为适用于各种复杂数字计算需求的理想选择[10] 。
ARM处理器有强大的软件可编程性,FPGA有强大
的硬件可编程性巧妙整合,ZYNQ实现和高效巧妙
的整合,同时 ZYNQ 支持高速接口,对于需要高速
数据传输的应用情况 ZYNQ 也可以高效地实现。
相对于传统的分离式 ARM和 FPGA搭配,ZYNQ采
取“底板+核心板”硬件设计,实现更高的集成度,进
而使采集系统的体积得到优化并兼具灵活性、可拓
展性[11] 。在设计一个高效的数据采集和处理系统
时,当进行多路输入信号的采集以及预处理阶段
时,利用 FPGA高速的并行处理能力来执行这些要
求实时性的任务。ARM处理器负责调度整个系统
充当系统的控制核心,包括下达采集指令、接收数
据以及数据的上传等功能。此外,ARM 处理器的
灵活性使得整个系统可以根据具体需求进行配置,
易于扩展新的功能。本文结合 ZYNQ 的优势与系
统的需求,提出了将ZYNQ平台应用于多通道船舶
噪声采集系统的设计方案,实现对船舶噪声的多通
道采集与传输。
2 多通道船舶噪声采集系统总体设
计方案
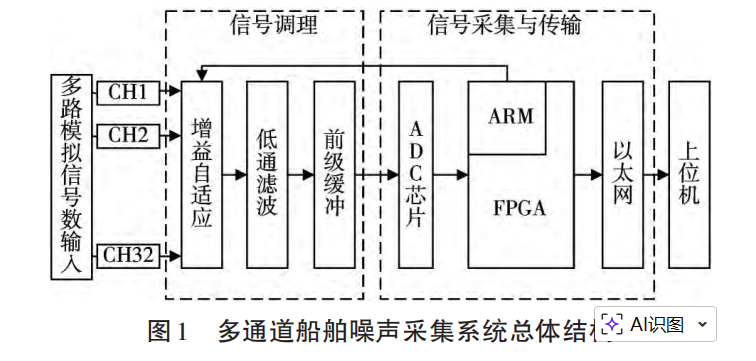
如图 1 所示,系统的整体结构主要由:噪声检
测传感器、信号调理单元、信号采集与传输单元,以
及上位机这四个部分组成。这种配置中,噪声传感
器负责实时监测舱室内的噪声水平,并将所采集的
信号传送至信号调理单元。信号调理单元针对不
同传感器提供的信号幅值执行增益切换、低通滤波
和前级缓冲等处理,以便为模数转换器(ADC)的采
样提供适当的前处理。此后,ADC负责实现连续的
模拟信号转到离散的数字信号的转换。转换后的
数字信号经由 ZYNQ 的 PS 端接收,并解析来自 PC
机的指令后通过 ZYNQ 内部的 AXI 总线,传输到
ZYNQ 的 PS 端,在这里实现对 ADC 的控制和采样
数据的接收。完成这些步骤后,采集到的数据通过
以太网通信接口发送到 PC 机,进行进一步的分析
和处理。这种设计不仅确保了数据采集的高效性
和准确性,还提高了系统对不同噪声类型的响应能
力和处理速度,使其能够在多种应用环境下可靠地
工作。
4 系统软件设计
系统上电后,ARM 处理器会首先执行自我初
始化操作,确保系统各个模块能够正常运行。完成
初始化后,ARM处理器进入待命状态,准备接收来
自 PC 机的采集控制指令。每当 ARM 处理器收到
来自 PC 机发送的指令,它将首先对指令内容进行
详细解析,并根据解析结果控制模拟开关,以完成
指定通道的增益调整,从而满足不同输入信号的处
理需求。接下来,ARM生成相应的采样控制指令,
并将其发送给FPGA。此后,ARM继续等待接收来
自PC机的下一条指令。如果在这个过程中没有收
到来自 PC 机的任何指令,ARM 需要检查 FPGA 是
否正在传输数据。如果ARM从FPGA接收到数据,
它将通过以太网接口将这些数据转发到上位机进
行进一步处理。这样可以确保数据能够及时传输
至上位机,以便进行后续的分析和处理工作。如果
没有接收到数据,ARM将继续等待来自 PC机的采
集控制指令。
在 FPGA 端,收到 ARM 下达的采集控制指令
后,它会进行相应的协议解析,这些协议包括指定
的采集通道和数据输出速率等关键参数。根据这
些参数,FPGA 将根据需求对 AD7768 进行必要的
初始化配置,确保其能够按照预定的参数和要求正
常运行,以便开始执行数据采集任务,并开始接收
从AD7768采集到的数据,与此同时,这些数据会被
存储到 SDRAM 中,以便后续进行处理和访问。这
样可以确保数据在接收后能够得到妥善保存,方便
后续的操作和使用。一旦累积的数据量达到预定
的量级,FPGA 则通过接口将数据回传给 ARM,从
而完成整个数据采集和控制流程。此过程的配置
和数据流向均在图5中详细展示。
5 结语
本 研 究 开 发 的 多 通 道 噪 声 采 集 系 统 基 于
ZYNQ 平台设计,结合了 FPGA 的高度硬件可编程
性和完整的ARM处理器系统。该系统的一个显著
特点是,ARM处理器与FPGA之间的数据传输速度
快且非常稳定,这种高效的交互机制不仅简化了开
发过程,降低了开发的复杂性,同时也显著缩短了
整个项目的开发时间,使得系统更易于实现和优
化。此外,该设计还支持方便地扩展各类外设。
ZYNQ 平台中的处理器系统(PS)与可编程逻辑
(PL)的协同工作确保了指令解析和数据传输的高
效性,从而为噪声数据的快速和可靠传输至 PC 机
提供了坚实保障。在实际应用中,该系统展现出广
泛的潜力,不仅促进了噪声检测技术的进步,还为
相关领域的工程应用开辟了更多的可能性。这些
优势使得本系统在船舶等噪声密集型行业中尤为
有价值,能有效地帮助工程师和研究人员进行更精
确的噪声分析和控制。
信迈提供ZYNQ定制服务。
